![]()
![]()
Optimization of a State-to-State Transfer in a Two-Level-System¶
[1]:
# NBVAL_IGNORE_OUTPUT
%load_ext watermark
import qutip
import numpy as np
import scipy
import matplotlib
import matplotlib.pylab as plt
import krotov
%watermark -v --iversions
qutip 4.3.1
numpy 1.15.4
scipy 1.1.0
matplotlib 3.0.2
matplotlib.pylab 1.15.4
krotov 0.0.1
CPython 3.6.7
IPython 7.2.0
\(\newcommand{tr}[0]{\operatorname{tr}} \newcommand{diag}[0]{\operatorname{diag}} \newcommand{abs}[0]{\operatorname{abs}} \newcommand{pop}[0]{\operatorname{pop}} \newcommand{aux}[0]{\text{aux}} \newcommand{opt}[0]{\text{opt}} \newcommand{tgt}[0]{\text{tgt}} \newcommand{init}[0]{\text{init}} \newcommand{lab}[0]{\text{lab}} \newcommand{rwa}[0]{\text{rwa}} \newcommand{bra}[1]{\langle#1\vert} \newcommand{ket}[1]{\vert#1\rangle} \newcommand{Bra}[1]{\left\langle#1\right\vert} \newcommand{Ket}[1]{\left\vert#1\right\rangle} \newcommand{Braket}[2]{\left\langle #1\vphantom{#2} \mid #2\vphantom{#1}\right\rangle} \newcommand{op}[1]{\hat{#1}} \newcommand{Op}[1]{\hat{#1}} \newcommand{dd}[0]{\,\text{d}} \newcommand{Liouville}[0]{\mathcal{L}} \newcommand{DynMap}[0]{\mathcal{E}} \newcommand{identity}[0]{\mathbf{1}} \newcommand{Norm}[1]{\lVert#1\rVert} \newcommand{Abs}[1]{\left\vert#1\right\vert} \newcommand{avg}[1]{\langle#1\rangle} \newcommand{Avg}[1]{\left\langle#1\right\rangle} \newcommand{AbsSq}[1]{\left\vert#1\right\vert^2} \newcommand{Re}[0]{\operatorname{Re}} \newcommand{Im}[0]{\operatorname{Im}}\) The purpose of this example is not to solve an especially interesting physical problem but to give a rather simple example of how the package can be used in order to solve an optimization problem.
Define the Hamiltonian¶
In the following the Hamiltonian, guess field and states are defined.
The Hamiltonian \(\op{H}_{0} = - \omega \op{\sigma}_{z}\) represents a simple qubit with energy level splitting \(\omega\) in the basis \(\{\ket{0},\ket{1}\}\). The control field \(\epsilon(t)\) is assumed to couple via the Hamiltonian \(\op{H}_{1}(t) = \epsilon(t) \op{\sigma}_{x}\) to the qubit, i.e., the control field effectively drives transitions between both qubit states. For now, we initialize the control field as constant.
[2]:
def ham_and_states(omega=1.0, ampl0=0.2):
"""Two-level-system Hamiltonian
Args:
omega (float): energy separation of the qubit levels
ampl0 (float): constant amplitude of the driving field
"""
H0 = - 0.5 * omega * qutip.operators.sigmaz()
H1 = qutip.operators.sigmax()
psi0 = qutip.Qobj(np.array([1,0]))
psi1 = qutip.Qobj(np.array([0,1]))
eps0 = lambda t, args: ampl0
return ([H0, [H1, eps0]], psi0, psi1)
H, psi0, psi1 = ham_and_states()
The projectors \(\op{P}_0 = \ket{0}\bra{0}\) and \(\op{P}_1 = \ket{1}\bra{1}\) are introduced since they allow for calculating the population in the respective states later on.
[3]:
proj0 = psi0 * psi0.dag()
proj1 = psi1 * psi1.dag()
Define the optimization target¶
First we define the time grid of the dynamics, i.e., by taking the following values as an example, we define the initial state to be at time \(t=0\) and consider a total propagation time of \(T=5\). The entire time grid is divided into \(n_{t}=500\) equidistant time steps.
[4]:
tlist = np.linspace(0, 5, 500)
Next, we define the optimization targets, which is technically a list of objectives, but here it has just one entry defining a simple state-to-state transfer from initial state \(\ket{\Psi_{\init}} = \ket{0}\) to the target state \(\ket{\Psi_{\tgt}} = \ket{1}\), which we want to reach at final time \(T\). Note that we also have to pass the Hamiltonian \(\op{H}(t)\) that determines the dynamics of the system to the optimization objective.
[5]:
objectives = [
krotov.Objective(initial_state=psi0, target=psi1, H=H)
]
In addition, we have to define and assign a shape function \(S(t)\) for the update in each control iteration to each control field that will be updated. This shape usually takes care of experimental limits such as the necessity of finite ramps at the beginning and end of the control field or other conceivable limitations for field shapes: wherever \(S(t)\) is zero, the optimization will not change the value of the control from the original guess.
[6]:
def S(t):
"""Shape function for the field update"""
return krotov.shapes.flattop(t, t_start=0, t_stop=5, t_rise=0.3, t_fall=0.3, func='sinsq')
At this point, we also change the initial control field \(\epsilon_{0}(t)\) from a constant to a shaped pulse that switches on smoothly from zero and again switches off at the final time \(T\). We re-use the shape function \(S(t)\) that we defined for the updates for this purpose (although generally, \(S(t)\) for the updates has nothing to with the shape of the control field).
[7]:
def shape_field(eps0):
"""Applies the shape function S(t) to the guess field"""
eps0_shaped = lambda t, args: eps0(t, args)*S(t)
return eps0_shaped
H[1][1] = shape_field(H[1][1])
Having defined the shape function \(S(t)\) and having shaped the guess field, we now tell the optimization to also use \(S(t)\) as the update-shape for \(\epsilon_0(t)\). In addition, we have to choose lambda_a for each control field. It controls the update magnitude of the respective field in each iteration.
[8]:
pulse_options = {
H[1][1]: krotov.PulseOptions(lambda_a=5, shape=S)
}
It is convenient to introduce the function print_fidelity, which can be passed to the optimization procedure and will be called after each iteration and thus provides additional feedback about the optimization progress.
[9]:
def print_fidelity(**args):
F_re = np.average(np.array(args['tau_vals']).real)
print(" F = %f" % F_re)
return F_re
Simulate dynamics of the guess field¶
Before heading towards the optimization procedure, we first simulate the dynamics under the guess field \(\epsilon_{0}(t)\).
[10]:
def plot_pulse(pulse, tlist):
fig, ax = plt.subplots()
if callable(pulse):
pulse = np.array([pulse(t, args=None) for t in tlist])
ax.plot(tlist, pulse)
ax.set_xlabel('time')
ax.set_ylabel('pulse amplitude')
plt.show(fig)
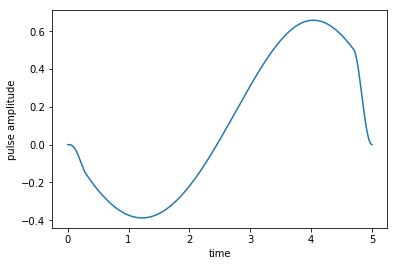
The following plot shows the guess field \(\epsilon_{0}(t)\), which is, as chosen above, just a constant field (with a smooth switch-on and switch-off)
[11]:
plot_pulse(H[1][1], tlist)
The next line solves the equation of motion for the defined objective, which contains the initial state \(\ket{\Psi_{\init}}\) and the Hamiltonian \(\op{H}(t)\) defining its evolution.
[12]:
guess_dynamics = objectives[0].mesolve(tlist, e_ops=[proj0, proj1])
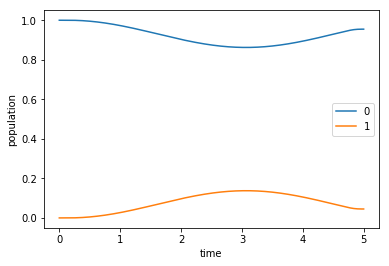
The plot of the population dynamics shows that the guess field does not transfer the initial state \(\ket{\Psi_{\init}} = \ket{0}\) to the desired target state \(\ket{\Psi_{\tgt}} = \ket{1}\).
[13]:
def plot_population(result):
fig, ax = plt.subplots()
ax.plot(result.times, result.expect[0], label='0')
ax.plot(result.times, result.expect[1], label='1')
ax.legend()
ax.set_xlabel('time')
ax.set_ylabel('population')
plt.show(fig)
[14]:
plot_population(guess_dynamics)
Optimize¶
In the following we optimize the guess field \(\epsilon_{0}(t)\) such that the intended state-to-state transfer \(\ket{\Psi_{\init}} \rightarrow \ket{\Psi_{\tgt}}\) is solved.
The cell below carries out the optimization. It requires, besides the previously defined optimization objectives, information about the optimization functional \(F\) (via chi_constructor) and the propagation method that should be used. In addition, the number of total iterations is required and, as an option, we pass an info-hook that after each iteration combines a complete printout of the state of the optimization with the print_fidelity function defined above.
Here, we choose \(F = F_{re}\) with \begin{equation} F_{re} = \Re\Braket{\Psi(T)}{\Psi_{\tgt}} \end{equation}
with \(\ket{\Psi(T)}\) the forward propagated state of \(\ket{\Psi_{\init}}\).
[15]:
oct_result = krotov.optimize_pulses(
objectives,
pulse_options=pulse_options,
tlist=tlist,
propagator=krotov.propagators.expm,
chi_constructor=krotov.functionals.chis_re,
info_hook=krotov.info_hooks.chain(
krotov.info_hooks.print_debug_information, print_fidelity
),
check_convergence=krotov.convergence.check_monotonic_fidelity,
iter_stop=10,
)
Iteration 0
objectives:
1:|(2)⟩ - {[Herm[2,2], [Herm[2,2], u1(t)]]} - |(2)⟩
adjoint objectives:
1:⟨(2)| - {[Herm[2,2], [Herm[2,2], u1(t)]]} - ⟨(2)|
λₐ: 5.00e+00
S(t) (ranges): [0.000000, 1.000155]
duration: 0.6 secs (started at 2018-12-20 08:17:54)
optimized pulses (ranges): [0.00, 0.20]
backward states: None
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (2.12e-01:0.50π)
F = 0.000000
Iteration 1
duration: 1.3 secs (started at 2018-12-20 08:17:55)
optimized pulses (ranges): [0.00, 0.29]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (3.16e-01:0.23π)
F = 0.235157
Iteration 2
duration: 1.3 secs (started at 2018-12-20 08:17:56)
optimized pulses (ranges): [0.00, 0.37]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (4.91e-01:0.14π)
F = 0.444066
Iteration 3
duration: 1.3 secs (started at 2018-12-20 08:17:57)
optimized pulses (ranges): [-0.07, 0.44]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (6.44e-01:0.10π)
F = 0.611354
Iteration 4
duration: 1.3 secs (started at 2018-12-20 08:17:59)
optimized pulses (ranges): [-0.14, 0.50]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (7.60e-01:0.08π)
F = 0.735071
Iteration 5
duration: 1.3 secs (started at 2018-12-20 08:18:00)
optimized pulses (ranges): [-0.20, 0.55]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (8.41e-01:0.07π)
F = 0.821734
Iteration 6
duration: 1.4 secs (started at 2018-12-20 08:18:01)
optimized pulses (ranges): [-0.26, 0.58]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (8.96e-01:0.06π)
F = 0.880461
Iteration 7
duration: 1.3 secs (started at 2018-12-20 08:18:03)
optimized pulses (ranges): [-0.30, 0.61]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (9.31e-01:0.05π)
F = 0.919555
Iteration 8
duration: 1.3 secs (started at 2018-12-20 08:18:04)
optimized pulses (ranges): [-0.34, 0.63]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (9.54e-01:0.04π)
F = 0.945388
Iteration 9
duration: 1.6 secs (started at 2018-12-20 08:18:05)
optimized pulses (ranges): [-0.36, 0.65]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (9.69e-01:0.04π)
F = 0.962447
Iteration 10
duration: 1.3 secs (started at 2018-12-20 08:18:07)
optimized pulses (ranges): [-0.39, 0.66]
backward states: [1 * ndarray(500)]
forward states: [1 * ndarray(500)]
fw_states_T norm: 1.000000
τ: (9.78e-01:0.03π)
F = 0.973756
[16]:
oct_result
[16]:
Krotov Optimization Result
--------------------------
- Started at 2018-12-20 08:17:54
- Number of objectives: 1
- Number of iterations: 10
- Reason for termination: Reached 10 iterations
- Ended at 2018-12-20 08:18:08
Simulate dynamics of the optimized field¶
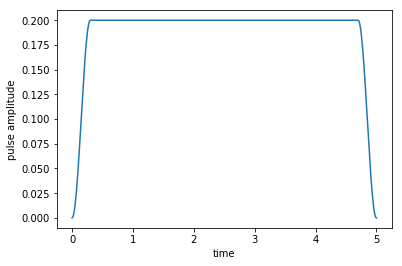
Having obtained the optimized control field, we can now plot it and calculate the population dynamics under this field.
[17]:
plot_pulse(oct_result.optimized_controls[0], tlist)
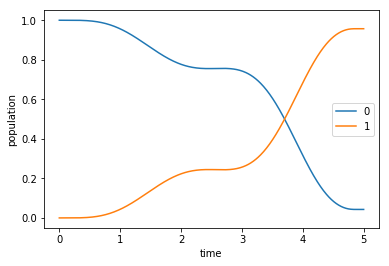
In contrast to the dynamics under the guess field, the optimized field indeed drives the initial state \(\ket{\Psi_{\init}} = \ket{0}\) to the desired target state \(\ket{\Psi_{\tgt}} = \ket{1}\).
[18]:
opt_dynamics = oct_result.optimized_objectives[0].mesolve(
tlist, e_ops=[proj0, proj1])
[19]:
plot_population(opt_dynamics)